top of page
Andrés Alejandro Díaz Toro, Ing., M.Sc., Ph.D.
Postdoctoral Researcher
Professor at UNAD


Chapter of Book

Papers in International Journals

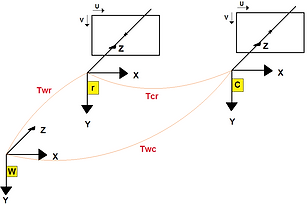
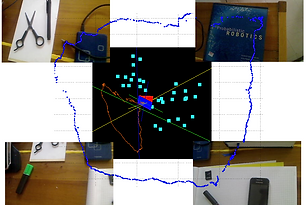
Vision-Based System for Assisting Blind People to Wander Unknown Environments in a Safe Way
Andrés Alejandro Díaz Toro, Sixto Enrique Campaña Bastidas, Eduardo Francisco Caicedo Bravo, In Journal of sensors, Hindawi, 2021


Please reload
Papers in National Journals


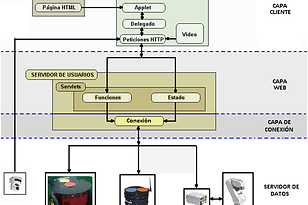
FLARER, FRAMEWORK PARA EL DESARROLLO DE LABORATORIOS DE ACCESO REMOTO SOBRE REDES DE ALTA VELOCIDAD (RENATA) EN EL ÁREA DE LA ROBÓTICA
Díaz, A., Lamprea J., Calvache B., Buitrago J., and Caicedo E. e-colabora: Revista de ciencia, educación, innovación y cultura apoyadas por Redes de Tecnología Avanzada, RENATA. ISSN: 2027-7416, v.2 fasc.4. Pags. 1 - 11 2012
Please reload
Papers in International Events
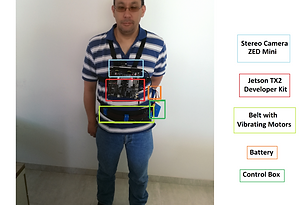
METHODOLOGY TO BUILD A WeARABLE SYSTEM FOR ASSISTING BLIND PEOPLE IN PURPOSEFUL NAVIGATION
January 01, 2020
A. A. Diaz Toro, S. E. Campaña Bastidas and E. F. Caicedo Bravo, In 2020 3rd International Conference on Information and Computer Technologies (ICICT), San Jose, CA, USA, 2020, pp. 205-212, doi: 10.1109/ICICT50521.2020.00039.

Please reload
Papers in National Events


Please reload
bottom of page